Пневматический захват – это специализированное оборудование, которое используется для захвата и перемещения различных объектов. Различные модели имеют схожую конструкцию. Удержание осуществляется губками захвата (пальцами), которые управляются сжатым воздухом. Для управления предусматриваются цилиндры одинарного или двойного действия. Для решения простых задач достаточно устройств с двумя пальцами. Их количество увеличивается до трех, если нужно удержать заготовку сложной формы. На рисунке представлены различные типы пневматических захватов, которые используются в промышленности.
Пневматический захват – это специализированное оборудование, которое используется для захвата и перемещения различных объектов. Различные модели имеют схожую конструкцию. Удержание осуществляется губками захвата (пальцами), которые управляются сжатым воздухом. Для управления предусматриваются цилиндры одинарного или двойного действия. Для решения простых задач достаточно устройств с двумя пальцами. Их количество увеличивается до трех, если нужно удержать заготовку сложной формы. На рисунке представлены различные типы пневматических захватов, которые используются в промышленности.
Преимущества пневматических захватов
Основными достоинствами следует выделить:
- малый вес;
- эффективен с экономической точки зрения;
- возможность развить большую силу;
- удержание заготовок различной формы;
- регулировка силы захвата.
Принцип работы пневматического захвата
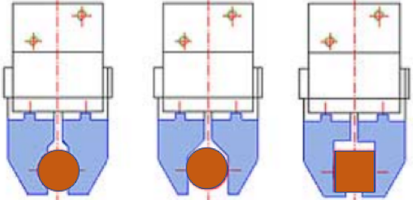
Захват подключен к системе подачи сжатого воздуха. Он поступает в цилиндр под давлением, что приводит в движение шток. В свою очередь, шток поршня соединяется с губками захвата. Это позволяет с высокой точностью контролировать положение пальцев. Схожий механизм действует в системе перемещения.
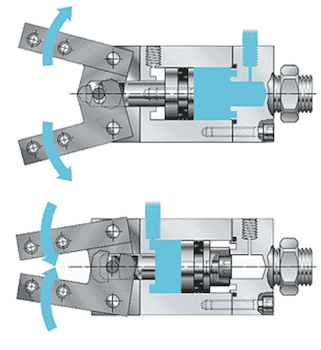
На рисунке представлен принцип работы пневматического механизма с двумя пальцами. Используется система с двойным цилиндром. Сначала, сжатый воздух подается к заднему цилиндру, что приводит к выталкиванию поршня – пальцы открываются. Для их смыкания используется обратная схема. При подаче сжатого воздуха в переднюю емкость, шток поршня толкается назад.
Типы захвата
Существует несколько способов удержания заготовки. Используется классификация на основании плоскости движения пальцев. Подробнее остановимся на используемых механизмах.
Параллельный и угловой захват
Как следует из названия, пальцы перемещаются в плоскости, параллельной корпусу захвата. Данный вариант считается наиболее популярным, поскольку имеет простую конструкцию и позволяет работать с различными типами заготовок.
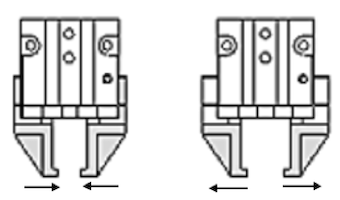
Пальцы перемещаются радиально. Они открываются и закрываются вокруг некоторой центральной точки. Подобная технология подходит для ситуаций, когда приходится работать в ограниченном пространстве. Часто используется для удержания заготовок большого размера и нестандартной формы.
Двух и трехпальцевые пневматические захваты
Наибольшей популярностью пользуются устройства с двумя элементами удержания. Они конструктивно проще и обладают рядом преимуществ. Пальцы двигаются синхронно, открываются и закрываются за счет движения поршневой системы.
Захваты с тремя элементами зажима оптимально подходят для предметов круглой формы. Они обладают большей силой. Движение пальцев происходит по направлению к центральной оси. Конструкция обеспечивает точное центрирование.
Внешний и внутренний захват
Существует несколько способов удержания заготовки, каждый из которых считается оптимальным в определенной ситуации.
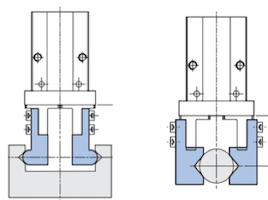
Внутренний тип захвата обеспечивает удержание за счет усилия открытия. Давление происходит на внутреннюю поверхность заготовки. Внешний захват считается наиболее распространенным. Он предусматривает захват объекта с внешней стороны.
Довольно редко встречаются комбинированные модели пневматических устройств. Они способны реализовать внутренний и внешний способ удержания заготовок.
Захваты одностороннего и двустороннего действия
Существует конфигурация одинарного или двойного действия. В первом случае, имеется вспомогательная пружина. Она предназначается для помощи движения пальцев в определенном направлении (на открытие или закрытие).
Пневматические захваты двойного действия считаются более функциональными. Они открываются и закрываются за счет давления со стороны сжатого воздуха. Некоторые модели оснащаются функцией подпружинивания. Она удержит заготовку, если случится внезапная потеря давления в системе.
Магнитные захваты
Далеко не всегда использование пневматических пальцев является оптимальным решением. В некоторых ситуациях приходится работать с ферромагнитными материалами. Мощность постоянных магнитов регулируется путем подачи электрического тока. Здесь существует важное ограничение – не допускается использование в ситуациях, когда заготовки нагреваются. Постоянные магниты теряют магнитные свойства при температурах свыше 150 градусов.
Форма пальцев
Используется такая форма для пальцевых захватов, которая лучше всего подходит для решения поставленных задач. Выделяют:
- охватывающая;
- фрикционная;
- удерживающая.
Они представлены на изображении по порядку – слева направо.
Для обеспечения захвата, в большинстве случаев, применяются силы трения – это классический подход. Альтернативный вариант – это специальная конструкция пальцев. Они могут быть рассчитаны на заготовки конкретной формы, чтобы минимизировать площадь соприкосновения и требуемое усилие. Под данные требования подходит охватывающая и фрикционная форма пальцев.
Повторяемость
Пневматический захват обладает определенной точностью позиционирования. Данный параметр зависит от различных моментов. Чаще всего, учитывается скорость работы оборудования и количество пальцев. Показатель повторяемости рассчитывается в индивидуальном порядке для каждого типа технологических операций.
Сила захвата
Рассматриваемая характеристика является одной из важнейших. Это сила, с которой пальцы воздействуют на заготовку. Она способна варьироваться, в зависимости от давления воздуха в пневматической системе и других параметров.
Подробнее рассмотрим расчет усилия захвата, которое требуется для удержания заготовки только за счет трения.
![]()
В данной формуле:
F – сила захвата со стороны одного пневматического пальца.
m – масса заготовки;
g – ускорение свободного падения (является константой 9,81 м/с2);
a – ускорение от динамического движения;
n – количество пневматических пальцев, которые используются для захвата заготовки;
μ – коэффициент трения;
s – коэффициент безопасности.
Формула действует только в том случае, если удержание осуществляется за счет сил трения. Как уже отмечалось ранее, существуют другие способы захвата, для которых подобный метод расчета не актуален.
Коэффициент трения
Подробнее остановимся на данном параметре. В таблице рассмотрим коэффициент трения наиболее популярных материалов.
| Материал заготовки | Материал захватов | Коэффициент трения |
| Сталь | Сталь | 0,25 |
| Сталь | Алюминий | 0,35 |
| Сталь | Пластик | 0,5 |
| Алюминий | Алюминий | 0,49 |
| Алюминий | Пластик | 0,7 |
| Пластик | Пластик | 1 |
Представлены приблизительные значения, которые получены в оптимальных условиях. Реальные показатели могут отличаться.
Коэффициент безопасности
Это особая характеристика, созданная специально для рассматриваемой формулы. Коэффициент безопасности составляет:
- 2 для обычных случаев применения;
- 3 при движении в различных плоскостях;
- 4 при возникновении ударов, движений с ускорением или торможением.
Способы монтажа
Для установки в конструкции предусмотрены монтажные отверстия. Они располагаются в нижней части, сбоку и спереди захвата. Это повышает надежность крепления.
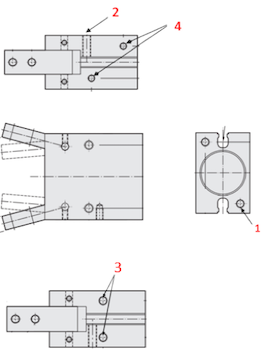
На примере рисунка можно увидеть конструкцию. Цифры 1,2 и 3 означают монтажные отверстия, 4 – это воздушный порт.
Датчики
Чтобы контролировать работу и перемещение пальцев, можно использовать сенсоры. Чаще всего, применяются переключатели и датчики приближения. Большинство моделей пневматических захватов оснащаются специальными канавками на корпусе.
Сенсорный переключатель способен определить, в каком положении находятся пальцы – открытом или закрытом. Что касается датчиков приближения, они сообщают о расстоянии до объекта. Информация моментально передается на контроллер. На рисунке представлена канавка для размещения сенсора.